详情
机电及轨道交通装备检测与智能控制技术的探索者——兰州交通大学机电技术研究所所长孟建军
2021-04-08
兰州交通大学机电技术研究所是专业从事铁路、交通运输和物流装备及信息化建设的产学研一体化专业科研机构。兰州交通大学机电技术研究所所长、学术带头人孟建军教授积极探索机电及轨道交通装备检测与智能控制技术,带领团队开发出高端振动时效装备、动车组电流互感器线路误差及铁芯锈蚀检测装置、智能轨道螺栓作业机、动车检修整备作业自动接地系统、共享停车综合管理系统等。以兰州交通大学机电技术研究所为依托,孟建军教授带领团队以载运工具智能控制技术为出发点,以机车车辆和城市轨道车辆为研究对象,开展无人驾驶城轨车辆运动控制方法、大风环境下自动驾驶高速列车运行姿态检测及控制策略、高速车辆主动悬架超磁致伸缩作动器设计理论及控制方法、基于无人机的高速铁路线路病害智能巡检系统的研究等,主持现代铁路物流和公铁水(公路、铁路、水运)及航空多式联运研究等省部级项目,并负责甘肃省物流行业信息统计工作。他不懈探索,为促进西部乃至全国的交通信息化建设作出了应有贡献。
1 智能轨道螺栓作业机
铁路轨道在运行一段时间后,不可避免地会产生钢轨应力积聚、轨道螺栓锈蚀等问题,严重威胁铁路运输的安全运营。孟建军教授团队研发的智能轨道螺栓作业机(图1)能够对铁路轨道螺栓进行维护,并完成钢轨应力消除、轨道螺栓扭矩检测与记录等工作,大大提高轨道维护的质量和效率,可以更好地保障铁路列车的安全运行,对推动我国铁路工务建设的机械化及自动化具有重要的现实和长远意义。
该装置分为行走单元、作业单元和控制单元。行走单元负责装置行进并精准定位轨道螺栓;作业单元是进行铁路轨道维护的主要执行机构;控制单元作为该装置的“大脑”,主要负责对作业单元和行走单元进行控制,并对轨道螺栓的扭矩值进行检测与记录。与市场现有的单头与双头轨道螺栓维护设备相比,该四头轨道螺栓维护设备具有智能化程度高、功能完善、安全可靠等优点,提高了工人的作业效率,降低了劳动强度,具有良好的市场应用前景。
2 高端振动时效装备
孟建军教授带领科研团队以消除金属工件残余应力为目标,历时多年,开发出基于超磁致伸缩材料的振动时效控制系统系列产品,并于2012年12月通过甘肃省科技成果鉴定。基于超磁致伸缩材料,开展从单点到多点振动时效控制系统研究。利用磁致伸缩材料研制激振器,模拟敲击振动,使得构件内部残余应力迅速得以消除和均化;开发振动时效控制器,克服了传统振动时效工作频率范围较窄的缺点;通过加速度传感器测得被振工件的振动响应信号,经过信号放大、峰值检测、A/D转换等完成对响应加速度的采集,利用智能算法对采集的数据进行处理,实现振动时效过程的自动判断和结果分析,振动时效作业现场如图2所示。项目组与相关企业合作,对所研发的系列产品进行推广应用,取得了较好的经济效益。该系统已经销往罗马尼亚等多个国家和地区,销售及使用情况良好。
3 动车检测技术与装备
针对动车组存在的问题,孟建军教授带领团队开发出动车检测技术与装备。
3.1 动车组电流互感器线路误差及铁芯锈蚀检测装置
动车组开口式电流互感器在使用一段时间后,其内部铁心质量发生变化,发生锈蚀,不能准确反映一次侧通过的电流,超过规定的线路误差,造成差动保护装置的误判。动车组电流互感器线路误差及铁芯锈蚀检测装置对动车组电流互感器的线路误差进行检测,并判定开口式电流互感器铁心的锈蚀情况,对动车组的检修、及时预警和安全运行有重要意义。检测装置在中车唐山机车车辆有限公司得到成功应用,解决了线路误差检测及铁心锈蚀情况判定等问题,获得用户单位的好评。图3展示了动车组电流互感器检测现场。
3.2 动车检修整备作业自动接地系统
动车组在动车所检修期间需要通过隔离开关将额定电压为25 kV的接触网断开并另挂接地杆,以保证检修作业安全。待车顶作业完成后再断开接地装置和恢复接触网的通电状态。由于涉及高压,会对工作人员生命安全和设备安全造成威胁。如何确保登车顶检修工作人员的人身安全和设备安全,是动车所安全生产的重要环节。动车整备作业接触网自动接地系统采用集中管理分布式控制模式,变“人控”为“机控”,能够改变动车所整备作业手挂接地杆模式存在的弊端,确保整备作业人员安全,实现整备作业安全监控的信息化和自动化。
4 共享停车综合管理系统
传统的停车场服务模式已跟不上现代化智慧停车的发展,为解决城市停车难问题,研发以私家车位为研究对象的智能城市共享停车服务系统已成为必然趋势。为此,孟建军教授团队开发了共享停车管理系统。系统由服务器、停车场监控机、停车场服务平台、智能控制终端、移动App五大部分组成。服务器是整个系统信息沟通桥梁,实现App与停车场数据信息交互;App实时访问车场车位信息查询并提供车位出租等功能;监控机经智能控制终端管理所有车位信息与相关硬件,并实时反馈车位及设备信息;服务平台集其他所有子系统信息于一体,既向App客户端提供所需信息,又对停车场进行监控管理。
系统适用于小区私家车位共享使用,使小区内车主既能出租车位,外来车主又能租赁车位。车场车位管理全程自动化无需人工干预,实现城市小区私家车位智慧管理,促进小区私家车位管理效率和质量的提升,有利于资源利用的最大化,为未来同类平台开发以及实现车位共享管理提供借鉴。
5 载运工具智能控制技术
以载运工具智能控制技术为出发点,以机车车辆和城市轨道车辆为研究对象,孟建军教授开展了系列研究。
5.1 无人驾驶城轨车辆运动控制方法研究
在对无人驾驶城轨车辆的运动进行控制时,采用集成智能控制算法,研究多目标无人驾驶城轨车辆牵引控制策略,实现城轨车辆安全、正点、节能、舒适、快速及停车准确等运行要求;针对复杂内-外不确定因素,引入鲁棒控制理论来抑制车辆横向、垂向振动,提高列车运行平稳性和舒适性;构建牵引/振动控制耦合关系模型,揭示速度控制器和车辆振动之间的关联关系和参数匹配关系;构建基于物联网环境的城轨车辆无人驾驶分层分布控制模型,将其嵌入到无人驾驶城轨车辆运行控制系统中,实现无人驾驶城轨车辆状态参数快速一致的目标。
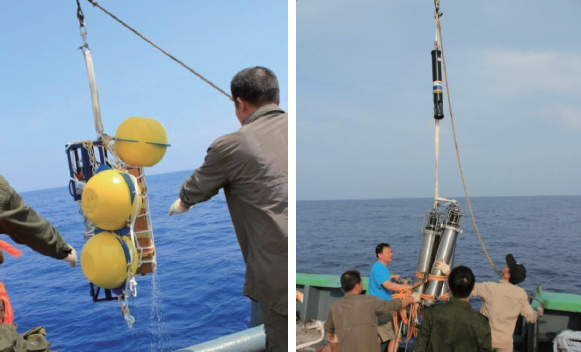
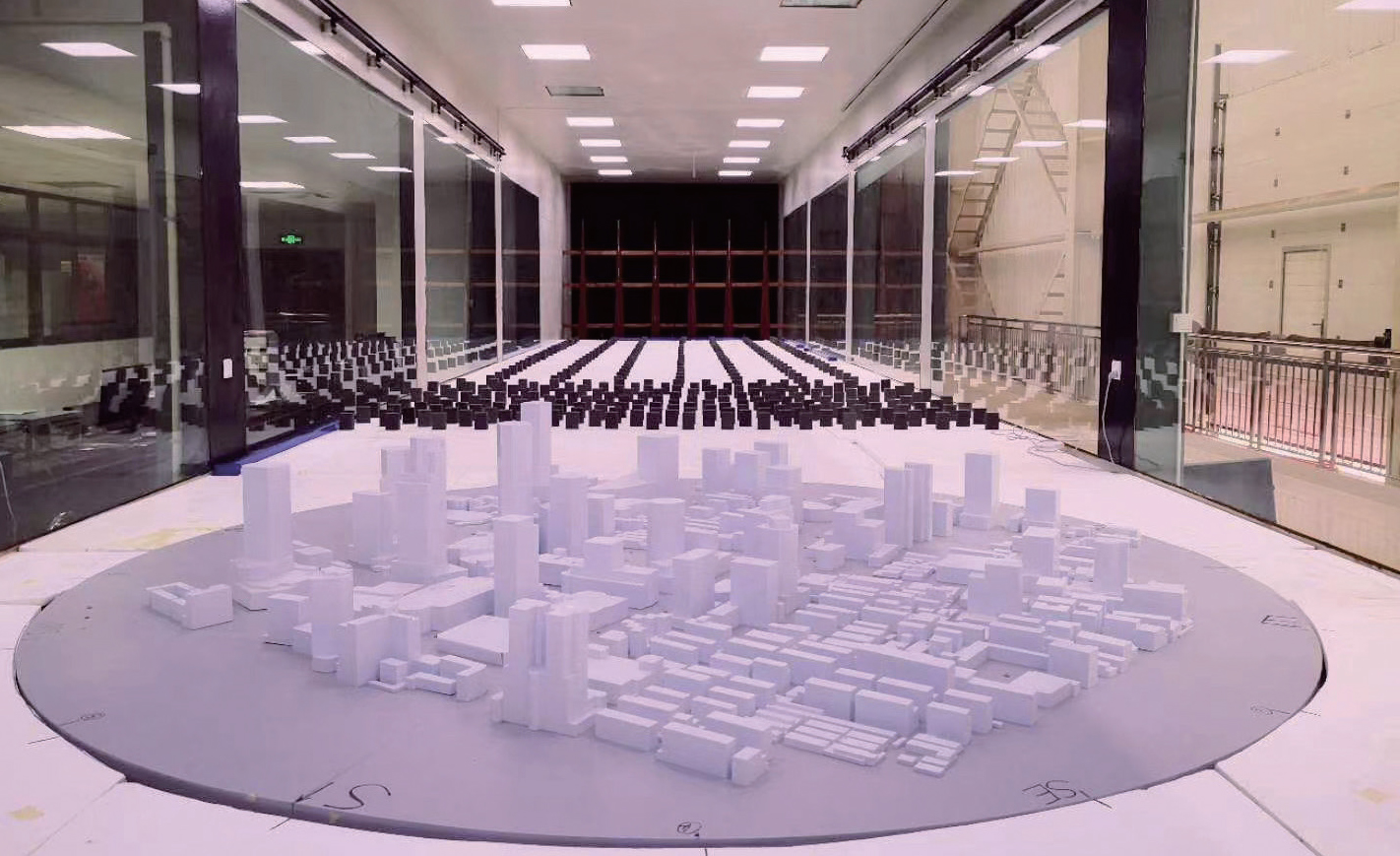
5.2 大风环境下自动驾驶高速列车运行姿态检测及控制策略研究
采用MEMS/GPS组合检测系统对高速列车运行姿态进行检测,建立误差补偿模型;对多自由度位移与姿态的相互制约关系进行分析,研究自动驾驶高速列车姿态主动控制策略。针对大风环境对高速列车车辆系统动力学模型造成的误差,对模型参数进行标定和补偿,并验证模型的合理性;考虑姿态变化和主动控制的关系,搭建列车多自由度位移与姿态控制器耦合关系模型;建立综合有效的集成智能控制算法,使列车姿态能精确地跟踪指令信号的变化,实现大风环境下自动驾驶高速列车运行姿态的主动控制。
5.3 高速车辆主动悬架超磁致伸缩作动器设计理论及控制方法研究
研究团队在对超磁致伸缩作动器的参数设计、动力学建模、振动控制机理和高速车辆主动悬架系统控制要求等问题进行研究的基础上,通过探究超磁致伸缩作动器振动控制规律与高速车辆横/垂向振动规律之间的耦合关系,明确高速车辆主动悬架系统超磁致伸缩作动器的智能控制方法,并搭建基于新型超磁致伸缩作动器的高速车辆主动悬架系统振动控制模型,实现抑制车辆横/垂向振动的目的,并完成对该振动控制模型的仿真分析及实验验证。
中国正在从交通大国迈向交通强国,在信息化和智能化方面还有很多工作要做。孟建军教授团队将在机电及轨道交通装备检测与智能控制技术方面不懈探索和创新,为我国交通强国建设作出新的贡献。
专家简介
孟建军,1966年生,博士,教授,博士生导师。现任兰州交通大学机电技术研究所所长、甘肃省物流及运输装备信息化工程技术研究中心主任、甘肃省物流与运输装备行业技术中心主任。2005年起获得兰州交通大学“青蓝”工程人才基金资助,2010年3月至今获聘甘肃省领军人才。主持国家自然科学基金项目2项,省部级项目、大型科研和工程项目30余项。在国内外期刊上发表学术论文100余篇,主编出版教材3部,培养博士研究生6名、硕士研究生100余名。获甘肃省科技进步奖二等奖3项、甘肃省高校科技进步奖一等奖2项、兰威城镇水务科技发明一等奖1项、甘肃省电子学会科技进步一等奖1项,其他厅局级奖励20余项。