详情
高海拔环境科考站辅助值守机器人项目取得重要进展
2021-01-08
由于青藏高原海拔高(主体高度超过4 000 m)、缺氧、天气恶劣多变等因素,科考人员无法到达某些区域,更无法开展长期持续科考,导致了科学研究数据匮乏、不系统等问题。由中国科学院沈阳自动化研究所承担的国家重点研发计划“智能机器人”重点专项“高海拔环境科考站辅助值守机器人”项目(项目编号:2018YFB1307500),针对高海拔科考面临的核心挑战与困难,开展辅助值守机器人研究,在完成高海拔科考飞行机器人的详细设计、载荷系统设计以及样机系统集成调试的基础上,于2020年7月4日至15日在西藏自治区纳木错科考站、廓琼岗日冰川等地开展了一系列飞行机器人飞行实验,先后完成10余项科考任务,测试了样机系统在实际科考环境的性能和任务功能,取得重要进展。
1 实验完成情况
为测试样机系统性能,项目开展了一系列飞行机器人飞行实验。
1.1 飞行机器人载重-抗风能力测试
高原科考需要搭载各类型科学载荷设备,同时高原科考环境风场变化快速而剧烈,因此,载重能力和抗风性是科考飞行机器人能否应用于实际科考作业的关键技术指标。项目团队在中国科学院青藏高原研究所纳木错实验场地开展了搭载5公斤载荷(设备+配重)抗风飞行实验。纳木错实验场地海拔高度4 700 m,在测试过程中出现了14.3 m/s的强阵风,并伴有小雨,飞行机器人飞行状态稳定,地面站及载荷系统工作正常,能够满足科考任务载重和抗风性要求。
1.2 湖上垂直剖面大气数据采集实验
纳木错湖具有重要的科考价值,采集湖面上方空气温湿度等大气数据是研究区域气候变化的重要指标。测试过程中,旋翼飞行机器人搭载大气数据获取载荷设备及配重(5 kg)在湖面开展垂直爬升飞行实验,从湖面以1.5 m/s匀速爬升,爬升至海拔5 000 m高度,爬升速度保持良好,动力充沛,获取了湖面上4 700 m海拔至5 000 m高度剖面的准确大气温湿度数据,相比传统探空气球等数据获取方式具有效率高、回收率高以及操作简便的明显优势。
1.3 湖上水体采样实验
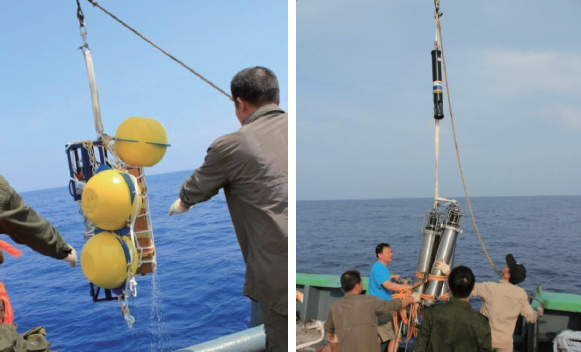
湖水采样是纳木错湖泊研究的重要内容。旋翼飞行机器人适配水体采样载荷设备,采用遥控方式进行了飞行机器人水体采样实验,获取了约60 m深度的水体样本,验证了飞行机器人水体采样的任务功能和流程,为后期开展大范围水体采样积累了宝贵经验。
1.4 冰川三维地形勘测与建模
该项实验地点为廓琼岗日冰川,海拔高度5 200 m至5 800 m。飞行机器人搭载激光雷达载荷设备,沿着冰川表面匀速飞行,从冰川末端至垭口,采集了约1 km长、60 m宽的三维地形点云数据,建立了该区域范围内冰川的精准三维模型,在验证该功能的同时也为与地面机器人的协作提供了重要基础数据。
1.5 冰川表面热红外影像监测
该项实验地点为廓琼岗日冰川,海拔高度5 200 m至6 000 m。飞行机器人搭载可见光-红外双光吊舱载荷,在飞抵冰川上空对冰川末端至垭口的全部区域进行高清摄像和红外热成像扫描,获取了冰川的全貌和热成像图像,为研究冰川变化以及温度特性提供了重要的参考数据。
1.6 冰川上空温湿压与黑碳通量垂直梯度变化监测
为验证飞行机器人的高海拔作业能力,同时获取冰川上空垂直剖面的大气温湿度以及黑炭通量等数据,在廓琼岗日冰川上空进行了搭载大气监测、黑炭通量监测设备的爬升飞行实验,从海拔5 600 m起飞点爬升至6500 m海拔高度,飞行机器人爬升动力充沛,成功获取了这一高度范围大气温湿度以及黑炭通量等多项重要科学数据。
2 取得的阶段性成果
项目团队研制的“云雀”飞行机器人可携带5 kg科考载荷,抵御7级大风,在6 000 m海拔飞行近30分钟,率先实现了我国6 000 m以上海拔飞行机器人的自主载重作业。
在青藏高原的廓琼岗日冰川成功实现了冰川表面温度热红外影像监测、冰川三维地形勘测与建模、海拔6 500 m高空段大气温湿压与黑碳通量垂直梯度变化监测等工作(图2),获得了大量有重要科学价值的科考数据;同时,开展了飞行机器人地面建模实验,为后续空地协同科考奠定了技术基础。
在纳木错多圈层综合观测研究站,成功实现了大气温湿压与黑碳通量垂直梯度变化监测、纳木错湖区60 m深度水体样品自动化采集、湖水温度垂直剖面实时监测(图3)等近10项科考任务。实验证明,项目研制的飞行机器人可对目前青藏高原科考站实现功能全覆盖。
项目团队克服高海拔、低压、缺氧、严寒等恶劣气候环境,率先在青藏高原实施了高海拔冰川与湖泊机器人自动化科学考察研究应用,为第二次高原综合科学研究深入实施提供了有力的技术保障。未来,项目团队将总结该次实验发现的问题和经验,进一步简化飞行机器人的操控和保障工作,减少使用复杂度;提升飞行机器人雨雪天气的环境适应性和全天候作业能力;提高飞行机器人与科考载荷的适配性和快速更换能力,真正做到即插即用和快速适配。